
We continue from Part One of this journey our attempt to illustrate how one can start with calculus and arrive at the definition of a 1-dimensional manifold.
In the previous segment, we concluded with the fact that a curve in 
- A real-valued function
, which will help measure the length,
- A real-valued function
, which will help measure the curvature, and,
- A real-valued function
, which will help measure the torsion.
In this segment we will see some examples and discuss possible constructions that this allows us.
Examples:
The data ![(I,\ell, k, \tau) =([0,1], \ \sqrt{1+4t^2}, \ 2(1+4t^2)^{-3/2}, \ 0)](https://s0.wp.com/latex.php?latex=%28I%2C%5Cell%2C+k%2C+%5Ctau%29+%3D%28%5B0%2C1%5D%2C+%5C+%5Csqrt%7B1%2B4t%5E2%7D%2C+%5C+2%281%2B4t%5E2%29%5E%7B-3%2F2%7D%2C+%5C+0%29&bg=ffffff&fg=000&s=0&c=20201002)



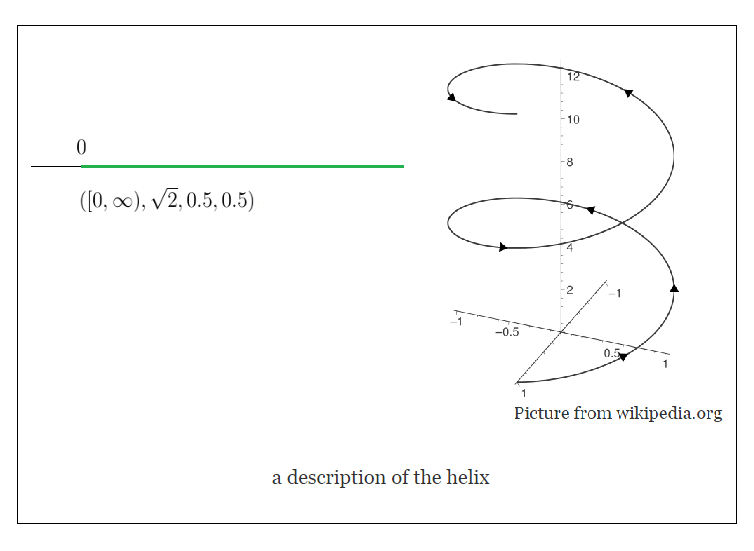
The data 

Equivalence of Curves
Often, the first thing one does after defining/constructing a new object in math is to define an appropriate notion of “sameness” between two of them. To this end, we have the following definition:
Definition: Two curves 






In calculus language, this would be a “re-parameterization” of a curve. If this happens, then the two curves that they describe coincide completely — they will overlap after a rotation and translation.
The above definition is derived from the plausible requirement for the following to hold:
![\int _{c}^d f(t) \ell _1(t) dt = \int _{\phi (c)}^{\phi (d)} f(s) \ell _2(s) ds, \ \forall [c, d]](https://s0.wp.com/latex.php?latex=%5Cint+_%7Bc%7D%5Ed+f%28t%29+%5Cell+_1%28t%29%C2%A0dt+%3D%C2%A0%5Cint+_%7B%5Cphi+%28c%29%7D%5E%7B%5Cphi+%28d%29%7D+f%28s%29+%5Cell+_2%28s%29%C2%A0ds%2C+%5C+%5Cforall+%5Bc%2C+d%5D&bg=ffffff&fg=000&s=0&c=20201002)
A change of variable 

Image by Behnam Esmayli.
Example:
We saw from our previous example that ![([0,1], \ \sqrt{1+4t^2}, \ 2(1+4t^2)^{-3/2}, 0)](https://s0.wp.com/latex.php?latex=%28%5B0%2C1%5D%2C+%5C+%C2%A0%5Csqrt%7B1%2B4t%5E2%7D%2C+%5C+2%281%2B4t%5E2%29%5E%7B-3%2F2%7D%2C+0%29&bg=ffffff&fg=000&s=0&c=20201002)
It turns out that the set of data ![([0,1], \ \sqrt{1+\frac {4}{s}}, \ 2(1+4s)^{-3/2}, \ 0)](https://s0.wp.com/latex.php?latex=%28%5B0%2C1%5D%2C+%5C+%5Csqrt%7B1%2B%5Cfrac+%7B4%7D%7Bs%7D%7D%2C+%5C+2%281%2B4s%29%5E%7B-3%2F2%7D%2C+%5C+0%29&bg=ffffff&fg=000&s=0&c=20201002)

Intrinsic Integration On Curves
Suppose that we are given a function which assigns to each point on a curve a real number, say the temperature at that point. We wish to find the average temperature over the curve. To do this, we need to add up (integrate) the temperatures at each point and divide the result by total number of points (length).
The following is an appropriate definition of the integral of a real-valued continuous function 

Again, it is adding up values of 

The reason this definition works is that if we calculate the integral using a different but equivalent set of data, then by the change-of-variables formula, we would get the same answer:

Observation: Our definition of integration only depended on the function 
Note: The integration above may be familiar from calculus, or complex functions, as a “line integral”. But it is usually not emphasized there that this is intrinsic to the curve. However, it indeed comes with the curve, independent of the embedding of the curve in

What’s next …
Now that we know a way of telling when two parameterizations coincide, in the next installment, we will be able to “glue together” pieces to arrive at a manifold.
The definition of the integration will work globally because different parameterizations agree on it locally.